
Fluggeräte
UAS-, eVTOL und UxS-Technologien im Überblick
Die Forschung an unbemannten Fluggeräten entwickelt nicht nur Maschinen, sondern sie definiert dabei technologische, gesellschaftliche und regulatorische Grenzen neu und entwickelt dabei gleichzeitig innovative Lösungen für komplexe Herausforderungen der Zukunft. Dies macht sie zu einer zentralen Säule der digitalen und nachhaltigen Zukunft der Luftfahrt.
Welche Arten von Fluggeräten gibt es?
Unbemannte Luftfahrzeuge werden in einer Vielzahl von Konfigurationen hergestellt, die sich in der Art der Auftriebs- und Vortriebserzeugung sowie der Flugsteuerung teilweise stark voneinander unterscheiden. Die für Kleindrohnen populärste Variante ist sicherlich der Multikopter mit mehreren fest installierten Rotoren, es gibt jedoch auch Drohnen mit starren Flächen – ähnlich konventioneller Luftfahrzeuge – oder mit schwenkbaren Rotoren. Darüber hinaus sind vielfältige Kombinationen möglich. Der elektrische Antrieb hat sich für kleinere Drohnen durchgesetzt, ist jedoch eine große Reichweite oder eine hohe Nutzlast gefragt, können auch Verbrennungsmotoren, Strahltriebwerke, Wasserstoff-basierte oder hybride Antriebsvarianten zum Einsatz kommen. Luftfahrzeuge, die leichter als Luft sind und daher nicht auf eine aerodynamisch basierte Auftriebserzeugung angewiesen sind, wie beispielsweise unbemannte Luftschiffe, bilden einen Nischenmarkt, können aber für bestimmte Aufgaben sinnvoll eingesetzt werden, da sie sehr energieeffizient betrieben werden können. Im Allgemeinen richtet sich die Art der Konfiguration nach dem Einsatzzweck: Multikopter sind klein, leicht und wendig und benötigen nur wenig Startfläche, da sie den Auftrieb jedoch über drehende Rotoren erzeugen können sie nur kurz fliegen und tragen wenig Nutzlast. Sie sind optimal für den Einsatz bei begrenztem Platzangebot. Im Vergleich dazu verfügen Starrflügler über eine hohe Reichweite bei langen Missionsdauern und sind deshalb insbesondere für Langstrecken-Missionen, wie die flächige oder lineare Überwachung von Infrastruktur, geeignet. Sie benötigen jedoch Start- und Landesysteme wie Rollbahnen, Rampen oder Schienensysteme. Sogenannte „Vectored Thrust“-Varianten kombinieren die Vorteile durch eine Kombination von Rotoren und starren Flächen (Flügeln) zur Auftriebserzeugung, wobei die Rotoren im Reiseflug entweder zur Vortriebserzeugung gekippt werden oder als Auftriebselemente dienen („lift-and-cruise“).
Multikopter
Bei den Multikoptern handelt es sich in der Regel um relativ kleine Fluggeräte, die ihren Auftrieb meist vollständig über mehrere Rotoren erzeugen. Üblich sind vier bis acht Rotoren, die symmetrisch angeordnet sind. Über die Variation der Drehzahl der einzelnen Rotoren kann der Auftriebsvektor (die Drohne) gekippt und die Bewegung in verschiedene Richtungen realisiert werden. Multikopter sind sehr wendig und können auch in bebauten Umgebungen mit wenig Platz manövrieren, zudem können sie in der Luft „anhalten“ (hovern).
{kind=link}
Forschungsbedarf
Aufgrund ihrer geringen Größe verfügen insbesondere kleine Multikopter oft über geringe Leistungsreserven und können nur eine geringe Nutzlast tragen. Insbesondere der Entwicklung innovativer, leichter und trotzdem robuster Materialien für die Struktur kommt daher eine besondere Bedeutung zu. Systemkomponenten wie Flugsteuerungscomputer, Antriebsstrang und Sensorik müssen hinsichtlich Größe, Gewicht und Leistungsaufnahme optimiert werden, wobei eine modulare Auslegung angestrebt werden sollte, um die Kleindrohnen missionsspezifisch konfigurieren zu können. Dies betrifft auch rechenintensive Komponenten zur Weiterentwicklung der automatischen oder autonomen Flugfähigkeiten wie die Sensordatenfusion. Im Bereich des Antriebsstranges bedarf es neuer, leistungs- und energieeffizienter Batterietechnologien.
Starrflügel-UAV
UAV mit starren Flächen, die der Auftriebserzeugung dienen, werden als Starrflügler oder Flächendrohnen bezeichnet. Sie ähneln konventionellen Flugzeugen und verfügen je nach Antriebsart über einen elektrischen, wasserstoffbasierten, hybriden oder konventionellen Antrieb. Für die Flugstabilität und -steuerung sind neben den auftriebserzeugenden Flächen andere aerodynamisch wirkende Strukturen wie Höhen- und Seitenleitwerke verbaut.
{kind=link}
Starrflügler sind sehr energieeffizient und können bei hohen Geschwindigkeiten lange Flugzeiten erreichen und große Gebiete überfliegen. Sie eignen sich dadurch hervorragend für die Überwachung großer Gebiete, wobei zwischen linearen (weitreichenden) und flächigen (auf ein großes Gebiet bezogene) Missionen unterschieden werden kann. Bis zu mehreren hundert Kilometern können dabei überflogen werden. Starrflügel-Drohnen werden daher beispielsweise in der Vermessung und Überwachung in der Landwirtschaft, bei der Kartierung und für Luftbildaufnahmen sowie im Such- und Rettungsdienst eingesetzt. Auch bei hoheitlichen Aufgaben und im militärischen Bereich, wie für Aufklärungs- und Überwachungsmissionen, leisten diese Drohnen wertvolle Dienste. Da reine Starrflügeldrohnen für den Start eine Mindestgeschwindigkeit erreichen müssen, sind für den Start entweder eine Rollbahn oder einer Schienenstruktur notwendig, die Landung erfolgt ebenfalls auf einer solchen Struktur oder an einem Fallschirm. Manche Starrflügler können auch aus der Hand gestartet werden.
Forschungsbedarf
UAV mit starren Flächen verfügen aufgrund ihrer Konfiguration häufig über größere Nutzlasten und längere Flugzeiten als (kleinere) Multikopter und kommen bei Langstrecken-Missionen, beispielsweise im Bereich der Umweltüberwachung, zum Einsatz. Daher bieten Starrflügler ein größeres Potenzial für neuartige, innovative Antriebssysteme wie beispielsweise Brennstoffzellen- oder Hybridantriebe. Neue Brennstoffzellen-Technologien wie Festoxid-Brennstoffzellen, Direktmethanol-Brennstoffzellen (DMFC) oder Schmelzkarbonat-Brennstoffzellen (MCFCs) bieten dabei eine hohe Energiedichte bei geringen Emissionen und hoher Effizienz. Die Herausforderungen liegen dabei in der Speicherung und in derzeit hohen Herstellungskosten. Neben den luftseitigen Komponenten wie den chemischen und elektrischen Energiespeichern, dem Verteilsystem, dem Kühlsystem und der Leistungselektronik sind auch neue, automatisierte Bodentechnologien zur Betankung und Wartung zu erforschen. Da Langstreckendrohnen weit entfernt von der Bodenstation operieren, sind zudem leistungsfähige, (cyber-)sichere und robuste Kommunikations-, Überwachungs- und Steuerungssysteme zu entwickeln.
UAV mit Schwenkantrieb
Einige UAV verfügen über schwenkbare Rotoren oder Flügel und vereinen somit die aerodynamischen Vorteile der Flächendrohnen mit der Agilität der Multikopter. Sie werden auch als „Transition-UAV“ bezeichnet, wobei der namensgebende Faktor der Wechsel vom Senkrechtstart bzw. vom Schwebeflug in den Horizontalflug notwendig ist.
{kind=link}
Dies bedingt hohe Anforderungen an die Flugsteuerungsfunktionen, zudem sind solche UAV durch die höhere Anzahl drehender Bauteile technisch komplex. Das Einsatzprofil von Schwenkantrieb-UAV umfasst Transport- sowie Überwachungsaufgaben wie auch Such- und Rettungsmissionen, wobei sie auch im urbanen Gebiet und anderen baulich begrenzten Umgebungen gut eingesetzt werden können.
Forschungsbedarf
Bei Transition-UAV stellt insbesondere die Mechanik der Schwenkmechanismen neue Herausforderungen an Funktionalität, Verschleiß- und Ausfallsicherheit. Zudem ist die Flugsteuerung beim Übergang vom vertikalen zum horizontalen Flug komplex und erfordert eine umfangreiche Systemidentifikation, wofür neue Verfahren und Algorithmen notwendig sind. Die Kombination von Rotoren und starren Flächen bedingt zudem eine aerodynamische Optimierung, um die Effizienz in allen Flugphasen zu optimieren. Wie auch bei den Starrflüglern können bei Transition-UAV neue Antriebstechnologien wie Brennstoffzellen- oder hybride Systeme zum Einsatz kommen.
eVTOL
Der Begriff eVTOL steht für „electric Vertical Take-Off and Landing” und bezeichnet Fluggeräte, die senkrecht starten und landen können und über einen elektrischen Antrieb verfügen. Dies wird durch mehrere (üblich sind mindestens vier) starr oder drehbar angeordnete Rotoren ermöglicht, es handelt sich also in der Regel um eine Multikopter-Konfiguration.
{kind=link}
Teilweise sind die Rotoren als Impeller ausgelegt. Mit eVTOL werden allerdings größere bemannte Fluggeräte bezeichnet, also „Lufttaxis“ im umgangssprachlichen Gebrauch. eVTOL können auch über starre Flächen zur Auftriebserzeugung im Reiseflug verfügen. Üblicherweise bieten eVTOL Platz für 1 – 5 Passagiere und verfügen derzeit noch über eine/n Pilot/In, in der Zukunft ist mit einem wachsenden Automatisierungsgrad bis zum teilautonomen Flug zu rechnen. Derzeit in Entwicklung oder bereits realisierte eVTOL-Konzepte sehen Reichweiten von etwa 30 – 100 km vor. In der Regel sind eVTOL für den innerstädtischen oder regionalen Personenverkehr als Taxi- oder Zubringerdienste ausgelegt, es gibt aber auch Konzepte für den Warentransport oder für medizinische Dienste. Viele eVTOL-Konzepte befinden sich derzeit noch in der Entwicklungsphase, es sind jedoch erste Passagierdienste in ausgewählten Städten für 2026 geplant. Als Start-, Lande- und Betriebsflächen verwenden eVTOL sogenannte Vertiports, die ähnlich Hubschrauberlandeplätzen am Boden, an Gebäuden oder sogar beweglichen Strukturen (z. B. Schiffe) installiert werden. Vertiports bilden die für den Betrieb von eVTOL-Diensten notwendige Infrastruktur ab, wozu neben den Flächen für Start, Landung und Abstellflächen beispielsweise auch Ladeinfrastruktur, Technologie für die Überwachung des Luftraums und Infrastruktur für die Passagierabfertigung wie Sicherheitskontrollen, Schalter und Warteflächen gehören.
Forschungsbedarf
Da eVTOL für die Personenbeförderung im urbanen Gebiet entwickelt werden und es sich damit um eine völlig neue Verkehrsmodalität handelt, ergeben sich eine Vielzahl an Forschungsfragen, die neben den technischen Luft- und Bodenkomponenten auch regulatorische und gesellschaftliche Fragestellungen umfassen.
Neue Konzepte für eVTOL müssen die sicheren und umwelt- sowie energieeffiziente Personenbeförderung ermöglichen und der Luftfahrtzertifizierung unterliegen. Forschungsfragen bestehen beispielsweise in Bezug auf die Zelle und Struktur (Verwendung leichter aber robuster und umweltschonender Materialien), den Antriebsstrang (optimierte batterieelektrische Konzepte), die Flugmechanik und Aerodynamik (effiziente, lärmarme Rotor- und Flügeldesigns) und die hochautomatisierte Flugsteuerung im Single-Pilot-Cockpit mit zuverlässigen, KI-gestützten Assistenzsystemen. Die Herstellung und der wirtschaftliche Betrieb von eVTOL im Personenverkehr verlangen zudem kostenreduzierende Konzepte durch hochratenfähige, modulare Bauweisen und neue Prozesse. Für die neuen Fluggeräte müssen auch neue Standards sowie Test- und Zertifizierungsmöglichkeiten erarbeitet werden.
Eine weitere Herausforderung stellt die Einbindung von Vertiports in die städtische Verkehrsinfrastruktur als Teil eines intermodalen Verkehrssystems dar. Es ergeben sich Forschungsfragen im Bereich der benötigten Kommunikations-, Navigations- und Überwachungssysteme, welche im städtischen Raum leistungsfähig und sicher den Betrieb von eVTOL unterstützen müssen, der Standortwahl sowie der Verkehrs- und Betriebskonzepte. Schnittstellen bestehen dabei zwischen den Fluggeräten, der Flugsicherung, gegebenenfalls dem Vertiport sowie der U-Space Service Provider und dem CISP und müssen die standardisierte, (cyber-)sichere und leistungs-/echtzeitfähige Datenübertragung ermöglichen. Des Weiteren bedarf es neuer Systeme für die Wartung, das Laden und die Energiespeicherung sowie Konzepte für die Passagierabfertigung (z. B. Sicherheitskontrolle, Check-In, Passagierinformationen).
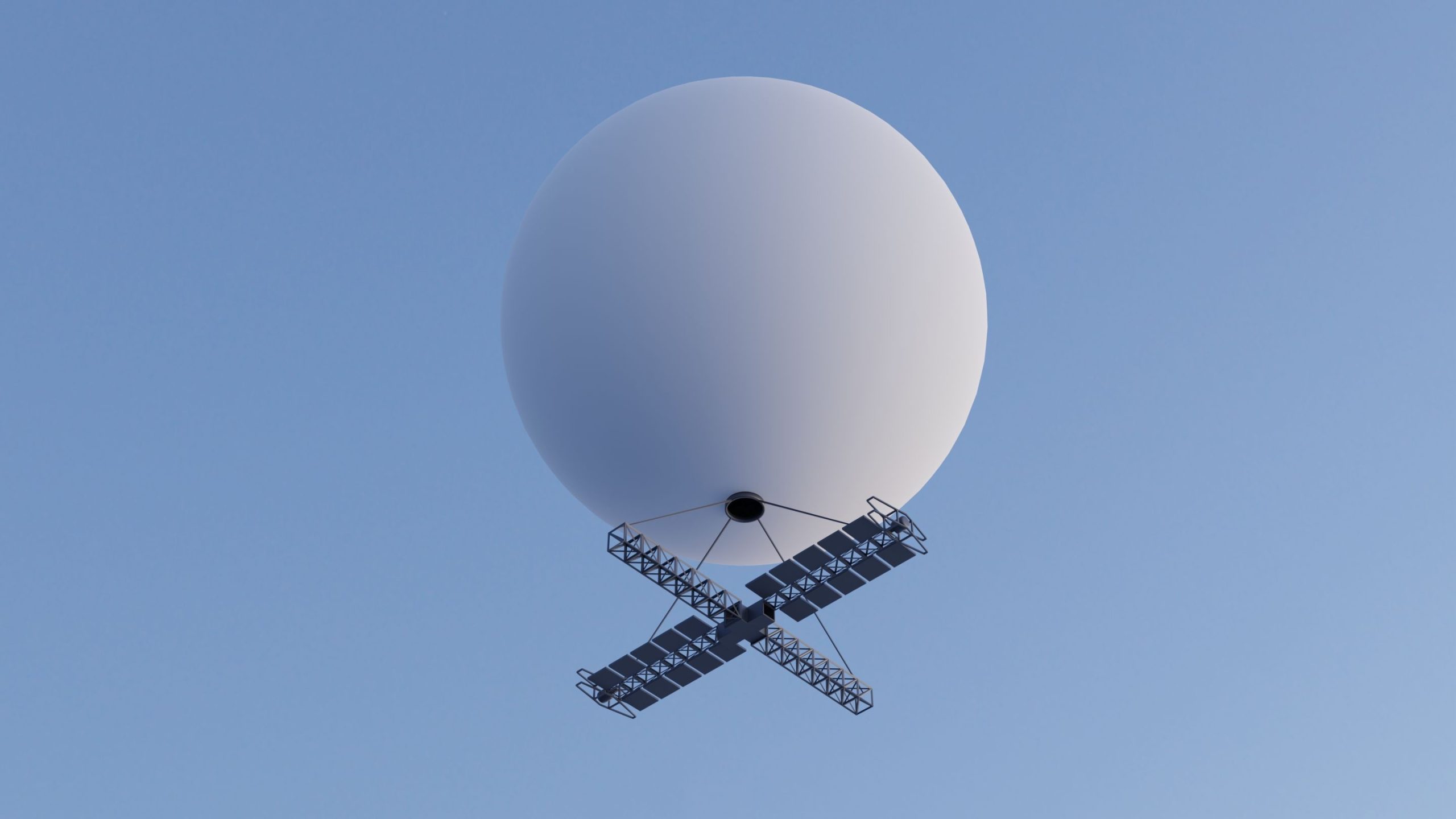
Ballondrohnen
Diese Art von Drohnen stellen derzeit Sonderfälle dar, eignen sich jedoch für bestimmte Missionen. Ballondrohnen erzeugen statischen Auftrieb, da das in ihnen enthaltene Gas (üblicherweise Wasserstoff oder Helium) leichter als Luft ist. Als zusätzliche Energieversorgung für den Antrieb – sofern vorhanden – oder die Nutzlast kommen Batteriesysteme oder Solarzellen zum Einsatz.
{kind=link}
Der Antrieb kann eine begrenzte lineare Bewegung erzeugen oder als Höhensteuersystem dienen. Da Ballondrohnen sehr hoch (bis in die Stratosphäre) und quasi unbegrenzt lange fliegen können, liegen mögliche Anwendungsbereiche in der Langzeitüberwachung (bspw. nach Umweltkatastrophen oder von landwirtschaftlichen Flächen) oder in der Umweltbeobachtung. So können Ballondrohnen beispielsweise über längere Zeiträume Umweltdaten, wie z.B. zur Luftqualität und Schadstoffen, sammeln. Zudem können Ballondrohnen als Kommunikationsplattformen dienen, um in abgelegenen Gebieten Internetzugang oder Funknetzwerke bereitzustellen. Gegenüber anderen UAV-Typen haben sie jedoch den Nachteil, dass sie nur über eine geringe Manövrierfähigkeit und Geschwindigkeit verfügen und dadurch sehr wetterabhängig sind.
Forschungsbedarf
Aufgrund ihrer sehr spezifischen Bauweise im Vergleich zu anderen UAS-Typen bedingen Ballondrohnen sehr spezifische Forschungsfragen. Diese umfassen beispielsweise die Entwicklung neuer Hüllenmaterialien, welche das Transportgas sicher speichern und robust gegenüber unterschiedlichen Wetterbedingungen (z. B. Wind, Strahlung, Niederschlag, Vereisung) sein müssen sowie die Erforschung neuer Transportgase. Im Bereich der Antriebe können unterschiedliche Kombinationen von batterieelektrischen, brennstoffzellenbasierten und hybriden Konzepten zum Einsatz kommen, wobei für die Erzeugung elektrischer Energie auch Solarzellen denkbar sind. Datenverbindungen müssen auch über große Entfernungen sicher und stabil sein. Besondere Fragestellungen ergeben sich auch bezüglich der Luftraumintegration, da Ballondrohnen eine geringe Manövrierfähigkeit aufweisen und potenziell große Höhen erreichen können.
Hochfliegende Stratosphärenplattformen (HAPS)
Diese Art von UAV stellt, wie die Ballondrohnen, noch einen Nischenmarkt dar. HAPS sind UAV-Starrflügler mit einer sehr hohen Flügelstreckung, die über einen elektrischen Propellerantrieb mit Solarzellen oder basierend auf Wasserstoff-Brennstoffzellen verfügen. Sie können sehr hoch (20 – 25 km) und lange (bis zu mehreren Monaten) fliegen.
{kind=link}
Ihr primärer Einsatzbereich liegt in der Bereitstellung von Telekommunikations- oder Datendiensten, in der Erdbeobachtung oder in der Erforschung der Stratosphäre. HAPS verfügen nur über einen geringen Leistungsüberschuss, sodass insbesondere der Aufstieg mehrere Stunden dauert. Zudem sind sie sehr wetteranfällig, insbesondere gegenüber Vereisung, Niederschlag und Wind.
Forschungsbedarf
Der Betrieb von HAPS erfordert spezifische Technologien für den langandauernden Flug in großen Höhen. Dazu gehören die Entwicklung von Antriebskonzepten für Langzeitflüge (z. B. Solarenergie, Brennstoffzellen), die Erforschung robuster Leichtbaustrukturen, Oberflächenmaterialien und aerodynamischer Konzepte für hochgestreckte Flügel und leistungsfähige, sichere Kommunikations- und Datenübertragungsverfahren. Alle Komponenten müssen den Flug in Stratosphärenbedingungen mit hohem Strahlungseinfall bei niedrigen Temperaturen und geringer Luftdichte standhalten. Die derzeit im Regelfall verwendeten Brennstoffzellensysteme müssen über leistungsfähige Konzepte zur Wärmeabfuhr verfügen. Insbesondere in den mehrere Stunden dauernden Auf- und Abstiegsfenstern durch mehrere Lufträume muss die sichere Separation zum konventionellen Flugverkehr bei geringer Manövrierfähigkeit sichergestellt werden, wofür neue Betriebskonzepte und Flugsicherungsverfahren zu erforschen sind.
Ihr Ansprechpartner für...
… UAS-Betrieb in der EASA-Kategorie „offen“
Luftfahrt Bundesamt (Registrierung der Betreiber (gilt nicht für Spielzeugdrohnen und Drohnen ohne Kameras < 250g))
… UAS-Betrieb in der EASA-Kategorie „offen“ in den Unterkategorien A1 und A3
Luftfahrt Bundesamt (Erstellung EU-Kompetenznachweis A1/A3)
… UAS-Betrieb in der EASA-Kategorie „offen“ in der Unterkategorien A2
Luftfahrt Bundesamt (Fernpiloten-Zeugnis A2)
… UAS-Betrieb in der EASA-Kategorie „speziell“
Luftfahrt Bundesamt (Erstellung EU-Kompetenznachweis A1/A3, EU-Fernpiloten-Zeugnis STS, Erteilung der Betriebsgenehmigung, Praktische Prüfung für Standardszenarien, Ausstellung Light UAS Operator Certificate (LUC))
Landesluftfahrtbehörde (Erteilung der Betriebsgenehmigung)
… UAS-Betrieb in der EASA-Kategorie „zertifiziert“
EASA (Zulassung und Zertifizierung von UAS und Betrieb (Typenzertifizierung, Betriebsgenehmigung, Pilotenzertifikat))
… Flüge in Geozonen von Flugplätzen
- Flugplatzbetreiber des jeweiligen Flugplatzes
… Flüge in Geozonen von Verkehrsflughäfen mit Kontrollzone
- Flugverkehrskontrollstelle (Tower) des jeweiligen Verkehrsflughafens
… für Flüge über Naturschutzgebieten und Wohngrundstücken, in einem Abstand < 150 Meter zu Menschenansammlungen, zu bestimmten Einsatzorten und Infrastruktur, über 120 Meter Höhe oder außerhalb der Sichtweite
… Betrieb von UAS durch BOS
… die Wetterlage
Welche UAV-Komponenten gibt es?
Flugsteuerung
Alle UAV verfügen über bestimmte Komponenten der Flugsteuerung, deren zentraler Teil der Flugsteuerungscomputer ist. Er empfängt die Signale sowohl von der Fernsteuerung (über eine Kabel- oder Funkverbindung) wie von den internen Sensoren, verarbeitet diese und gibt sie an die Steuerflächen oder Motoren weiter.
{kind=link}
Bei Multikoptern erfolgt die Bewegungssteuerung über die Drehzahlvariation der einzelnen Rotoren, wodurch das UAV dreht oder kippt und seine Flugrichtung ändert. Bei Starrflüglern werden bewegliche Steuerflächen angesteuert, die resultierende Änderung des Auftriebs an den betroffenen Flächen erwirkt eine Änderung des Flugweges.
Für die Übertragung der Steuerbefehle der Boden- bzw. Kontrollstation an das UAV, aber auch für den Austausch von Daten ist eine Datenverbindung notwendig. Sie wird auch „C2-link“ genannt, wobei „C2“ für Command-and-Control steht. Sie ermöglicht auch die Übertragung von Telemetriedaten (bspw. Höhe, Geschwindigkeit, Akkustatu) oder Sensordaten (bspw. Bilder) von der Drohne zum Boden. Die Kommunikationsverbindung kann funkbasiert oder kabelgebunden realisiert werden und verfügt oft über eine Verschlüsselung. Wird die Datenverbindung um erweiterte Kommunikationsmöglichkeiten vom Boden zur Drohne, aber auch zu anderen UAV ergänzt, handelt es sich um einen „Command, Control and Communications“-link (C3-link).
Autopilotenfunktionen können in unterschiedlichem Ausmaß implementiert sein: Während kleinere Multikopter in der Regel über einfache Funktionen wie das automatische Halten von Höhe, Flugweg und Geschwindigkeit verfügen, können fortschrittliche Autopiloten auch vorprogrammierte Wegpunkte oder Flugmuster abfliegen. Einige Autopiloten ermöglichen sogar das automatische Ausführen einer vorprogrammierten Mission inklusive Start und Landung. Die meisten Drohnen verfügen zudem über eine „Return-to-Home“-Funktion (RTH-Funktion), eine Sicherheitsfunktion, welche die Drohne bei bestimmten sicherheitskritischen Funktionen wie niedrigem Akkustand oder Verlust der C2-Verbindung zu einem vordefinierten Startpunkt zurückfliegen lässt.
Forschungsbedarfe
Die Flugsteuerungsfunktionen von UAV müssen in der Lage sein, beim automatischen oder teilautonomen Flug in dynamischen Umgebungen sicher ihre Flugbahn anzupassen. Diese Funktionen müssen auch in unnormalen oder Notfallsituationen zuverlässig verfügbar sein und den jeweils geltenden Vorschriften genügen. Dafür müssen neue, energieeffiziente Algorithmen erforscht werden, wobei Teilfunktionen sinnvoll auf KI-Algorithmen durchgeführt werden können. Einen weiteren Forschungsbereich bildet die kooperative Steuerung von UAV im Schwarmbetrieb, wofür Steuerungsfunktionen und Kommunikationsprotokolle erforscht werden müssen. Ein wichtiges Augenmerk liegt zudem auf der Verringerung der Latenzzeiten und der Cybersicherheit des C2/C3-links.
Sensorik
Je nach Auslegung verfügen Drohnen über unterschiedliche interne und externe Sensoren. Für die grundlegende Lageregelung und Navigation sind zumindest ein Höhenmessgerät, ein Magnetkompass sowie trägheitsbasierte Beschleunigungs- und Drehratensensoren zur Bestimmung der Lage und der linearen Bewegungen vorhanden. Zusätzlich verfügen die meisten UAV über einen Empfänger für die Satellitennavigation (GNSS-Empfänger).
{kind=link}
Um Kollisionen mit anderen Luftraumteilnehmern zu vermeiden, sind in vielen Ländern sogenannte Systeme zur Kollisionsvermeidung („Detect-and-Avoid“ – DAA) beim Betrieb von unbemannten Luftfahrtzeugen in bestimmten Zulassungskategorien oder Lufträumen vorgeschrieben. Für Europa gilt dies für den Betrieb von UAV in der „zertifizierten“ Kategorie sowie in der „spezifischen“ Kategorie, wenn das sogenannte „Luftrisiko“ (ARC) hoch ist (ARC-b oder höher), also bspw. in stark frequentierten Lufträumen und im BVLOS-Betrieb. DAA-Systeme sind somit eine wesentliche Schlüsseltechnologie für die Integration von Drohnen in den bemannten Luftraum. Das Prinzip des „Sehens und Ausweichens“ muss dabei nicht unbedingt durch technische Systeme umgesetzt werden, wo anwendbar können bspw. auch Beobachter eingesetzt werden. Häufig und insbesondere im BVLOS-Betrieb sind jedoch technische Maßnahmen unumgänglich. Diese können rein bordseitig, rein bodenseitig oder durch eine Kombination davon umgesetzt werden. Bordseitige Systeme nutzen dabei häufig die Fusion verschiedener Sensordaten wie Kamera, Radar und ADS-B-Signale, um Hindernisse zu erkennen und Ausweichmanöver zu initiieren.
Die externe Sensorik umfasst die für die Erfüllung der Mission notwendigen Komponenten. Diese können bspw. folgende Komponenten und Anwendungen umfassen:
- Kamerasysteme (RGB oder Infrarot) für Bild- und Videoaufnahmen für landwirtschaftliche Anwendungen oder Such- und Rettungsmissionen
- LiDAR-Sensorik für die Kartierung
- Multispektralsensorik für die Analyse von Pflanzen- und Bodenbedingungen
- Umweltsensoren, bspw. für die Messung von Luftpartikeln oder Luftfeuchtigkeit
Forschungsbedarfe
Insbesondere in Bezug auf Detect-and-Avoid-Systeme besteht Forschungsbedarf, da diese Systeme derzeit noch nicht leistungsfähig genug und / oder zu groß und schwer sind. Dafür sind die geeignete miniaturisierte Sensorik und die dafür notwendige energieeffiziente Datenfusion und Prozessierung zu erforschen. Die Sensortechnik muss dabei robust gegenüber Umweltbedingungen sein, d. h. auch bei Regen, Staub oder schlechter Sicht zuverlässige und präzise Daten liefern. Objekte und Hindernisse müssen dabei zuverlässig erkannt und klassifiziert werden. Insbesondere im Rahmen der Klassifizierung bieten sich dafür KI-Ansätze an. Für die Prozessierung der Sensordaten müssen geeignete Systeme zum Datenmanagement und der Prozessierung entwickelt werden. Insbesondere im Schwarmbetrieb kann der Einsatz von Edge- und Cloud-Computing erwogen werden.
Navigation
Die meisten UAV verwenden die Satellitennavigation als primäres Navigationsmittel. Diese basiert auf der Messung der Laufzeiten pseudorandomisierter Codes, die von Satelliten ausgesendet werden. Mittels Satellitennavigation werden bereits Genauigkeiten von wenigen Metern erreicht, durch verschiedene Maßnahmen wie Real-Time Kinematics (RTK) kann die Genauigkeit auf den Zentimeterbereich verbessert werden, indem eine Referenzstation mit exakt bekannter Position Korrektursignale an das UAV sendet.
{kind=link}
Während GNSS-Navigation prinzipiell genau ist, unterliegt es natürlichen und menschgemachten Fehlerquellen. Zu den natürlichen Störfaktoren gehören atmosphärische oder elektromagnetische Störungen, in einem stark bebauten Umfeld (bspw. städtische Umgebungen) können Fehler durch Mehrwegausbreitungen und Abschattung der Signale entstehen. Zudem sind GNSS-Signale relativ schwach und unverschlüsselt und können somit leicht gestört werden. Solches GNSS-Jamming/Spoofing tritt derzeit verstärkt nahe Konfliktregionen auf, aber auch in größeren Bereichen über der Ostsee und dem östlichen Mittelmeer. Es werden somit auch andere Navigationsmöglichkeiten verwendet, die komplementär zur GNSS-Navigation eingesetzt werden können.
Die Trägheitsnavigation, welche auf der Messung von Drehraten und linearen Beschleunigungen basiert, kann als Backup oder in Kombination mit der Satellitennavigation zur Bestimmung von Lage, Position und Geschwindigkeit eingesetzt werden. Kleine Trägheitssensoren werden bereits bei vielen UAS-Typen eingesetzt. Trägheitsnavigation bietet den Vorteil, dass sie unabhängig von bodengebundenen Anlagen die autarke Navigation ermöglicht, allerdings unterliegt sie einem zeitabhängigen und kumulativen Drift und kann deshalb nicht über längere Zeiträume autonom operieren. Zudem sind die aus der konventionellen Luftfahrt bekannten Trägheitsnavigationssysteme relativ groß und schwer.
Weitere Möglichkeiten der Navigation umfassen
- WLAN-Positionierung durch Messung der Signalstärke mehrere WLAN-Router
- Funkortung unter Nutzung bodengebundener Anlagen wie VOR und DME, Mode-N und PARS (Phased Array Radio System)
- optische Verfahren (RGB-Kamera, Infrarotkamera, LiDAR)
- akustische Verfahren
- Magnetik
Forschungsbedarfe
Einige der oben genannten Verfahren sind noch relativ neu und befinden sich teilweise noch auf einem niedrigen technologischen Reifegrad, sodass hier weitere Forschung notwendig ist, um sie für den kostengünstigen Betrieb von UAV nutzbar zu machen. Insbesondere die Datenfusion verschiedener Navigationssysteme und die Miniaturisierung der Gesamtsysteme stellt derzeit noch eine Herausforderung dar. Ein besonderer Fokus sollte in diesem Kontext auf der präzisen Navigation in GNSS-freien oder störanfälligen Umgebungen wie Städten, Innenräumen, Wäldern oder unter GNSS-Jamming/Spoofing liegen. Es stellt sich die Frage, welche Systeme dafür sinnvoll GNSS-Navigation ergänzen oder ersetzen können. Im Bereich der Hinderniserkennung und -Vermeidung sind Algorithmen zu erforschen, die das zuverlässige Erkennen und sichere Ausweichmanöver gewährleisten können. In diesem Kontext ist auch der Einsatz von KI bzw. maschinellem Lernen zu erörtern. Fragen der sicheren und zuverlässigen Navigation stellen sich zudem im Hinblick auf den Schwarmbetrieb.
Drohnenabwehr
Aufgrund der steigenden Anzahl illegaler Drohnenaktivitäten wachsen auch die Anforderungen an effektive, kostengünstige und rechtssichere Maßnahmen zu Abwehr von UAV, die unabsichtlich oder bewusst das Luftrecht verletzen oder eine Gefahr für Menschen oder Infrastruktur darstellen. Die dafür nutzbaren Technologien befinden sich häufig noch in der Entwicklung und umfassen beispielsweise Netzwerfer, elektronische Maßnahmen, Abfangdrohnen, die das Zielobjekt rammen oder mit Hilfe von Netzen einfangen sowie im militärischen Bereich auch Laser- oder konventionelle Waffensysteme. Viele von diesem Systemen befinden sich derzeit noch in der Entwicklung oder Erprobung.
{kind=link}
Generell muss bei der Drohnenabwehr stark zwischen dem jeweiligen Einsatzgebiet unterschieden werden: An oder in der Nähe von Flughäfen können elektronische Maßnahmen nur eingeschränkt zum Einsatz kommen, da sie auch den restlichen Flugverkehr stören könnten. Auch zerstörende Maßnahmen wie das Abschießen des Zielobjektes sind hier teilweise nicht nutzbar, da Trümmerteile auf dem Vorfeld, den Rollwegen oder den Start- und Landebahnen eine Gefahr darstellen. Dies gilt auch für das Abfangen von UAV über dichtbesiedelten Gebieten, wo Nicht-zerstörende Maßnahmen wie das Einfangen durch mit Netzen ausgestattete „Fangdrohnen“ besser geeignet sind. Dies birgt insbesondere im hoheitlichen / militärischen Kontext auch den Vorteil, dass das Zielobjekt nicht zerstört wird. Voraussetzung für die effektive Abwehr unrechtmäßig betriebener UAV ist jedoch die wirksame Früherkennung und Klassifizierung des Ziels, wofür leistungsstarke Radare, optische Erkennungssysteme und andere Sensoren eingesetzt werden können. Und nicht zuletzt müssen die Zuständigkeiten zwischen den Behörden bezüglich der Drohnenabwehr klar geregelt sein.
Forschungsbedarfe
Für die zuverlässige, schnelle und genaue Klassifizierung unkooperativer UAV sind leistungsstarke Algorithmen zur Sensordatenfusion und -Verarbeitung von bspw. Radardaten, akustischer oder optischer Sensorik oder Funkfrequenzerkennung notwendig. Insbesondere bei der Klassifizierung bieten sich hier KI-Algorithmen an. Technisch anspruchsvoll ist zudem die Umsetzung von kontrolliertem bzw. gerichtetem Jamming / Spoofing ohne unbeabsichtigte Störungen. Zukünftige autonom agierende Systeme könnten dabei sowohl Erkennung, Klassifizierung als auch die Abwehrmaßnahme selbstständig durchführen, wofür unter Anderem interoperable Protokolle und Datenschnittstellen zu anderen Kommunikations- und Dateninfrastrukturen zu erforschen sind.
Externe Ansprechpartner/ Informationen
Gut zu wissen:
Neuste Veröffentlichung: Positionspapier Drohnenabwehr des UAV Dach
Ansprechpartner: UAV DACH e.V. (https://uavdach.org/)
Einen Überblick zu den aktuellen Forschungsthemen im Bereich der Innovative Air Mobility finden Sie auch in den 10 Handlungsfeldern für eine zukunftsfähige Luftfahrtforschung auf der Website des Luftfahrtforschungsprogramms
Was sind die Besonderheiten bei militärischen Anwendungen und wo gibt es Synergien?
{kind=link}
Militärische UxS-Technologien
Unbemannte Luftfahrtsysteme spielen in der modernen Militärtechnologie eine entscheidende Rolle, mit hohen Synergien zwischen der Erforschung ziviler und militärischer UAS. Da UAS entweder autonom oder ferngesteuert operieren– ohne Besatzung an Bord –ermöglichen sie sichere, präzise und effiziente Missionen in gefährlichen oder schwer zugänglichen Gebieten. In diesem Kapitel beleuchten wir die Schlüsseltechnologien militärischer UAS: von Hochleistungsflugsystemen und fortschrittlichen Sensoren über datengetriebene Entscheidungsunterstützung bis hin zu Netzwerkkapazitäten und Cyber-Sicherheit.
Befähigung von Dual-Use-Anwendungen
Um UAS-Technologien sowohl für unterschiedliche zivile Anwendungen, wie auch für den militärischen bzw. hoheitlichen Einsatzfall zu flexibilisieren, sollten verschiedene Designfaktoren beachtet werden. Die Gestaltung von UAS hinsichtlich Dual-Use-relevanter Aspekte fördert dabei nicht nur den Einsatz in verschiedenen Anwendungsbereichen, sondern auch bei unterschiedlichen regulatorischen Rahmenbedingungen. Zudem können Synergieeffekte durch die Nutzbarmachung von Technologien aus anderen Sektoren erzeugt werden. Folgende Technologiebereiche und Designrichtlinien haben großes Potenzial für die Dual-Use-Befähigung von UAS:
Offene Architekturen und Interoperabilität
Durch die Nutzung standardisierter, flexibler Softwarearchitekturen, -Plattformen, Schnittstellen und Protokolle wird der Einsatz für unterschiedliche Missionen unterstützt. Dies betrifft sowohl die Steuerungs- wie auch Auswertungssoftware und die interne Datenverarbeitung. Offene und modulare Architekturen sowie einfach austauschbare, möglichst Software-basierte Sensoren sowie Nutzlasten ermöglichen die Interoperabilität zwischen verschiedenen Plattformen und Domänen wie Land, See, Luft und Weltraum. Proprietäre Lösungen sind hierbei zu vermeiden.
Autonomie
Eine gute Skalierbarkeit kann nur durch hoch automatisierte bzw. autonome Systeme ermöglicht werden, beispielsweise indem UAV ihre Missionen weitgehend selbstständig durchführen oder UAV-Schwärme durch kooperative Netzwerke zentral koordiniert werden. Dies erhöht die Einsatzfähigkeit und Flexibilität, reduziert die operativen Kosten und Personalanforderungen und verbessert die Sicherheit für das Personal. Dabei müssen klare Regeln und Schutzmechanismen eingehalten werden, um Missbrauch und Fehler zu verhindern. Zudem müssen die Entscheidungen und Aktionen autonomer Systeme stets für menschliche Akteure transparent und nachvollziehbar bleiben.
Reliable und sichere Datenübertragung
Insbesondere bei militärischen / hoheitlichen Anwendungsfällen ist eine verschlüsselte, zugriff- und manipulationssichere Datenübertragung von höchster Bedeutung. Dies trifft auch im zivilen Bereich zu, wenn beispielsweise personenbezogene Daten übertragen und verarbeitet werden. Durch Cloud-Integration können große Datenmengen flexibel verwaltet werden und die Rechenleistung bedarfsgerecht skaliert werden, allerdings bedarf es hier entsprechend ausgereifter Schutzmechanismen. Zudem unterstützen Cloud-Anbindungen die zivil-militärische Zusammenarbeit. Schlüsseltechnologien für die sichere Datenübertragung sind beispielsweise Ende-zu-Ende-Verschlüsselung, Hash-Funktionen, cybersichere Kommunikationsprotokolle, Frequenzhopping (bietet eingeschränkte Sicherheit), Intrusion-Detection-Systeme, gerichtete Verbindungen und Hardware-basierte Sicherheitsmodule.
Quantencomputing
Auf Quantencomuting basierende Systeme befinden sich derzeit noch in der Entwicklungsphase, bieten aber großes Potenzial für die Realisierung einer cybersicheren Datenübertragung von UAS. Bereits herkömmliche kryptografische Verfahren können durch die hohe Rechenleistung von Quantencomputern und der Technologie der Quantenrandomness (Zufallszahlen durch Quantenprozesse) schneller und effizienter eingesetzt werden. Spezifische Quantentechnologien wie die Quantenkryptografie, die auch Abhörversuche und Manipulationen sichtbar macht, können das Sicherheitsniveau erheblich erhöhen. Herausforderungen bestehen derzeit jedoch in der notwendigen Miniaturisierung (Gewicht, Energieversorgung) und ggf. der Kühlung der Quantencomputer für UAS-Anwendungen. Vielversprechende Ansätze sind beispielsweise Quantennetzwerke, bei denen jedes UAV als Knoten dient, Hybridlösungen mit herkömmlichen und Quanten-Protokollen und die Übertragung von Quantenbits durch Laserstrahlen.
Externe Ansprechpartner/ Informationen
Gut zu wissen:
Für die Lieferung von Gütern (d. h. Waren, Technologien oder Software) in andere Länder, also allgemein für die Außenwirtschaft, können besondere Beschränkungen und Genehmigungspflichten gelten. Dies betrifft insbesondere den Wirtschaftsverkehr mit Embargoländern sowie den Export von Rüstungsgütern und Technologien mit „dual-use“-Potenzial. Weitere Informationen hierzu erhalten Sie vom Bundesamt für Wirtschaft und Ausfuhrkontrolle sowie bei der Deutschen Industrie- und Handelskammer. Eine Übersicht über die einer Ausfuhrgenehmigungs- oder Verbringungsgenehmigungspflicht unterliegenden „Dual-Use-Güter“ geben die EU(VO) 2021/821 („EU-Dual-Use-VO“), Anhang 1 und die nationale Ausfuhrliste als Anlage AL zur Außenwirtschaftsverordnung (AWV).
Kontakt
Dr. Thomas Soodt
Jonathan Berberich
Wissenschaftlicher Mitarbeiter Gesamtsystemtechnologien
Projektträger Luftfahrtforschung
Tel: +49 228 447-182